- ���P���]
���W��ģ��ԇ���ҽ�B����
������λ�uί�ώ��ã����ǁ��ԏV�������WԺ10�����W�������I������ҫ���@λ���ҵ�����T���㣬�@λ���ҵ��������Ƽ��ͨ�^�҂���ͬӑՓ֮��_������������Ҫؓ؟��Փ�ģ��T������Ҫؓ؟���D������Ƽ��Ҫؓ؟���̣�����҂���ͬ�����ƪՓ�ġ�
�����ҵĽ�B�ꮅ���������ҁ�����҂�Փ�ĵĽ��}˼·���ȷ������}�����ģ�ͼ��O���ٽ���ģ����⡣
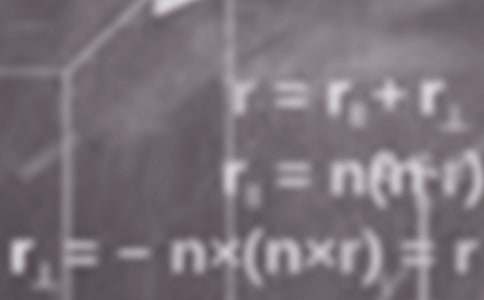
�������چ��}һ�����һ�����O��A��B��һ���돽��r�Ĉ@���ϵK��@�^�ϵK����A��B�����·����ͨ�^���D�����^���ó������о�����С�A�돽�ĈA������һ��Ŀ���c�ľ��x��̡�
�������]���C���˲���ץ���D�����D��·����ֱ��·�����е�һ�ΈA���M�ɣ�����ÿ�ĈA���İ돽��С��10��λ�������հ돽��С��10��λ�ĈA���D����Ӌ������_�����
��������2�N������
��������һ�����ЈA�����^������·�����ɾ��͈A���M�ɣ����������A�Y�����ڹ��c���c̎������С�D���돽10����λ��������̏�ģ�ͣ�����MATLAB�������·��
������������
������CAD���D������
����1.��CAD���L�D�����У��O�á��D�ν��ޡ���800*800����߅��߅������½Ǟ�ԭ�c����ע�Ͽ̶ȡ�
����2.�����á�ֱ�������c�������Ρ����A�������֡����L�D���ߣ���1��1�����L�D�Ƴ������ˡ��͡��C���˱��φ��}�������D��
����3.���á�ƫ�ơ����D�ӡ����ĺ��O�ù��ߣ��L�ơ���ȫ�������c�ϵK��ľ��x��10����
����4.�ٸ����C���˱��φ��}��Ҫ���㷨�����������OӋ�������c�ġ��������ܣ����c�IJ����A�ĵIJ������c�IJ��������á�ֱ�������A���L�D���ߺ͡����������L�Ƹ��N���ܵ�·����
����5.���á���ע���ġ����R�����ߜy����·�����A���Ļ��L�����á�{���ߡ��еġ���ԃ�������ԃ��·���ς����c�����˼����ΈA���ĈA�����ˡ�
����6.��·���ϸ��ξ��������L����ӣ����õ�·�����L�ȣ�O-A�����·����471��0372.O-B�����·����876��7043�� O-C�����·����1088��2044. O-A-B-C-O�����·����2729��8789.
�������چ��}�����mȻ�ĵ�һ���ѽ������������̣��������}Ŀ��ʽ��֪���C�������D���r���S���A���돽������D���ٶ�Ҳ����ʹ�C����O-A���ߵĕr�g��̣�������̕r�gģ�ͣ�����LINGO�����⣬���D���돽R=14�r����̕r�g��94.232�롣
�����Ƀ��c�����Č����}��������2�N������ͨ�^�����ģ�ͺ�����CADܛ�����ҳ���0�c����Ŀ���c��11�l·�������^Ŀ�˕r������С�돽��10����λ�����Ķ��c���о������^Ŀ���c�黡�����c������ǡ���ĈA��������CADܛ�����Եõ���Y�������_�ȸߣ�ͨ�^�ЈD������ʹ��ͨ������
����������ꮅ��Ո��λ�uί�ώ��c�u���ᆖ��
�����W��ģ��ԇ���ҽ�B�����P���£�
���W��ģԇ�}����04-01
���W��ģ�W���ĵ�02-19
���W��ԇ���ҽ�B04-14
���W���I��ԇ���ҽ�B03-09
���W���I��ԇ���ҽ�B02-05
���Ô��W���I��ԇ���ҽ�B05-08
���W���I��ԇ���ҽ�B��ƪ02-26